



 服務熱線
服務熱線
一、SLAM簡介
1.1. SLAM原理
SLAM是Simultaneous localization and mapping縮寫,意為“同步定位與建圖”。SLAM問題可以描述為: 掃描儀在未知環境中從一個未知位置開始移動,在移動過程中根據位置估計和地圖進行自身定位,同時在自身定位的基礎上建造增量式地圖,實現掃描儀的自主定位和導航。 
1.2. 3D SLAM
3D SLAM技術是激光掃描儀的運動軌跡是一條與工作人員行走的步態有關的非線性和高動態的曲線。按照一般的理解,激光掃描儀如果安裝在移動測量系統中,一定要有一個高精度的定位系統(POS系統)與之匹配,這樣,激光掃描儀得到的激光點才能得到對應的位置和姿態數據,進而合成三維的激光點云。為了能解算出激光點云數據的高動態非線性位姿,通過研究激光點云的處理算法,可從這些雜亂無章的點云中找到線索,求取其中隱含的更穩定的高階特征點和特征向量,并連續跟蹤這些特征點和特征向量,進而高精度地動態反向解算掃描儀的位置和姿態。這種高精度的動態反向解算位置和姿態的方法顛覆的傳統的測繪方法,為測繪技術開拓了一種新的思路方法。
二、SLAM技術特點
目前,現有的地面移動測量系統通常是基于車載的移動測量系統的,但目前地面移動測量系統均需要依賴于全球衛星導航系統(GNSS)和慣性導航系統,只能用于室外環境。然而,由于室內和地下空間等環境中沒有GNSS信號,因此,傳統的移動測量系統無法正常工作。固定式激光掃描可以用于室內室外的環境,但是復雜場景需要大量換站,然后進行點云拼接,數據獲取的效率十分低下。然而,即時定位與地圖構建(SLAM)技術在移動測繪方面具有較好的應用,不依托GNSS信號,能夠對室內和室外的地面水平環境進行地圖構建和環境建模。因此,SLAM技術在測繪領域中的應用降低了測量復雜性,不需要大量標記地物點,不需要GPS信號,適用于在室內室外場景,對于解決傳統測繪中的定位及場景重建問題具有廣闊的前景。
由于SLAM技術無需GNSS信號,對工作環境又有極強的適應性,基于SLAM技術的移動測量系統在多個測繪領域發揮作用,具體表現為:
(1) 外業數據采集速度極快,可快速獲得所需點云數據,數據精度高。
(2) 內業點云預處理時間短,自動化程度高,基本不需要人工干預,短時間便能獲得配準好的點云數據。
(3) 操作簡單方便,無需換站,連續采集,具有連貫性,可實現室內外一體化掃描作業。
(4) SLAM技術的測繪移動測量掃描儀在任意環境中長時間工作故障率低,對于精度要求較高的重點區域,可與固定測站式三維激光系統配合使用,既能保證精度,又能保證效率。
三、Geoslam HORIZON 特性
GeoSLAM Horizon 手持式移動三維激光掃描儀是由澳大利亞國家科學研究機構CSRO和英國三維激光雷達采礦行業解決方案提供者3D lasermapping公司以合資企業的形式成立,并聯合研發出的目前最輕便的SLAM掃描系統。

GeoSLAM Horizon 3D系統技術參數
產品特性:
?全套設備僅3.5kg,可移動的快速掃描多區域環境
?掃描頭自動旋轉,使動態掃描更加便捷,可進行360°全景掃描
?結構設計小巧,可進入低矮及狹小空間進行全方位數據采集
?支持手持、固定桿、背負、車載、船載、無人機載等多種方式掃描
?點云數據成果自帶反射強度值
?數據精度高
數據預處理軟件GeoSLAMHUB特性:
?原始數據拖放軟件內進行處理
?數據集合并
?在‘GeoSLAMDraw’中將3D數據轉換為2D矢量數據
?集成的2D和3D查看器
?支持五種主流點云格式導出
?點云數據,行進軌跡,影像資料同步查閱
四、Geoslam Horizon在房地一體測量應用方案
4.1. SLAM點云測圖流程
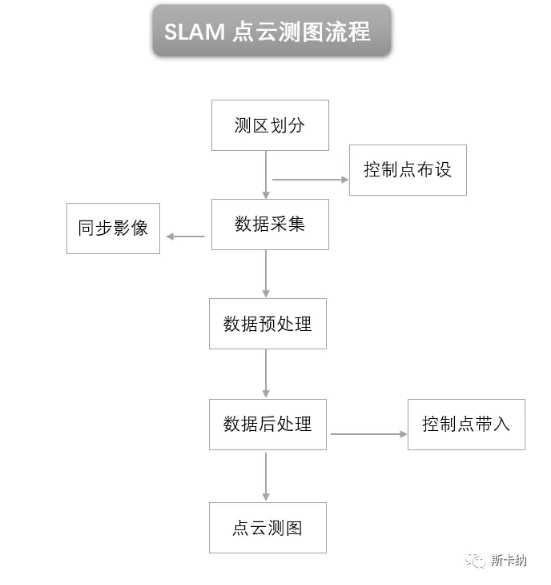
外業數據采集
A. 現場準備:

B. 現場掃描:
激光頭重1.3Kg,單塊電池可連續掃描4小時,可進入無GPS信號的狹小空間采集數據。

4.1.2.數據內業處理
(1)數據解算階段
將原始數據導入進預處理軟件hub里進行解算,解算數據所需時間和電腦的配置以及掃描所用時間相關,一般來說解算時間約為掃描時間的兩到三倍。

可在預處理軟件hub中查看點云數據的整體3D效果,也可以以2D效果圖來進行顯示。
當同步影像與點云相匹配之后,點云數據還能夠以RGB真彩色來顯示,與最終成果圖對比起來會顯得更加的直觀有效。
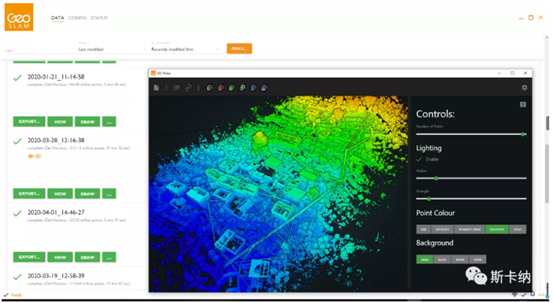
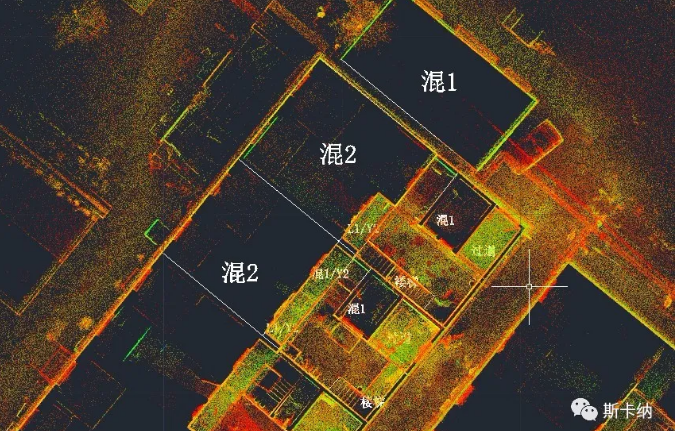
不同材質的物體具有不一樣的反射強度,所表示出來的色彩也會有所不同
(2)數據后處理階段
經過全自動預處理完成的點云數據,可導入軟件進行拼接,坐標轉換,裁剪分割,簡化后,直接輸出RCP工程文件

在測區內不同的平面位置處選取四個棱角分明的特征點,用RTK對這四個控制點測出大地坐標值,利用這四個控制點,將整個點云數據進行坐標轉換。

現場實測控制點,為后期坐標轉換做準備工作。

坐標轉換精度大約在4-8厘米之間。
4.1.3.依據點云成圖
RCP工程文件可通過處理軟件直接打開
導入點云后可直接進行三維測圖

總結
隨著三維激光掃描技術的普及,越來越多的人已經感受到它與傳統測量儀器之間的天差地別。三維激光掃描技術利用了可以生成3D立體的點云數據,將建筑結構的各個方位都能兼顧的到,通過點云數據再進行后期成圖操作。這種作業方式不僅節約了時間,提高了作業效率,也大大減少了人力、物力的投入,更為重要的是,成圖的精度也很大程度上得到了保證。目前,三維激光掃描儀很多種選擇,而針對這種小范圍、密集度較高的房地一體化測量,手持式掃描儀作業方式靈活,僅用一人就可以完成外業掃描工作,作業時間可控,前期也可以進行掃描作業的整體規劃。這樣,使用Geoslam horizon來完成房地一體化測量便具備了充分的可行性。